Kapitel 3.9
Robotsäkerhet – från “burar ” till ” koboter”
Vi har sammanfattat den viktigaste informationen om säkerhetskoncept för din robotapplikation nedan. Lär dig hur du kan förhindra åtkomst till faror, begränsa robotrörelsen och säkerställa säker interaktion mellan människor och robotar. Upptäck betydelsen av säkerhetsstängsel, avancerade detekteringssystem och vikten av att planera samarbetsarbetsytor.
Standarder och väsentliga regler för robotsäkerhet
Roboter är oerhört mångsidiga och erbjuder ekonomiska automatiseringslösningar. Men de kan också vara ganska farliga.
Stora robotar med hög hastighet kan orsaka mycket allvarlig skada genom krossning och stötar. Därför har robotsäkerhet standardiserats internationellt i (EN) ISO 10218-1 och -2 och för USA i nästan identiska ANSI / RIA R15.06. Dessutom har en standard för mobilrobotar publicerats med ANSI / RIA R15.08. Vissa viktiga säkerhetsregler presenteras nedan.
Robotsäkerhet bygger på tre element:
- Förhindra tillgång från människor.
- Begränsa robotrörelsen.
- Gör fysisk kontakt säker.
Det tredje elementet, som gör fysisk kontakt säker, är ett relativt nytt koncept, ofta benämnt samarbetsrobotdrift. Det betyder ett specialdesignat robotsystem och ett operatörsarbete inom samma arbetsyta eller överlappande arbetsytor. Först måste samarbetsarbetsområdet och önskad människa och robotinteraktion planeras. Därefter identifieras riskerna och lämpliga säkerhetsåtgärder genomförs.

Vad är en “samarbetsrobot ”?
Den mest avancerade säkerhetsåtgärden är användningen av en samarbetsrobot, ibland kallad “cobot ”.
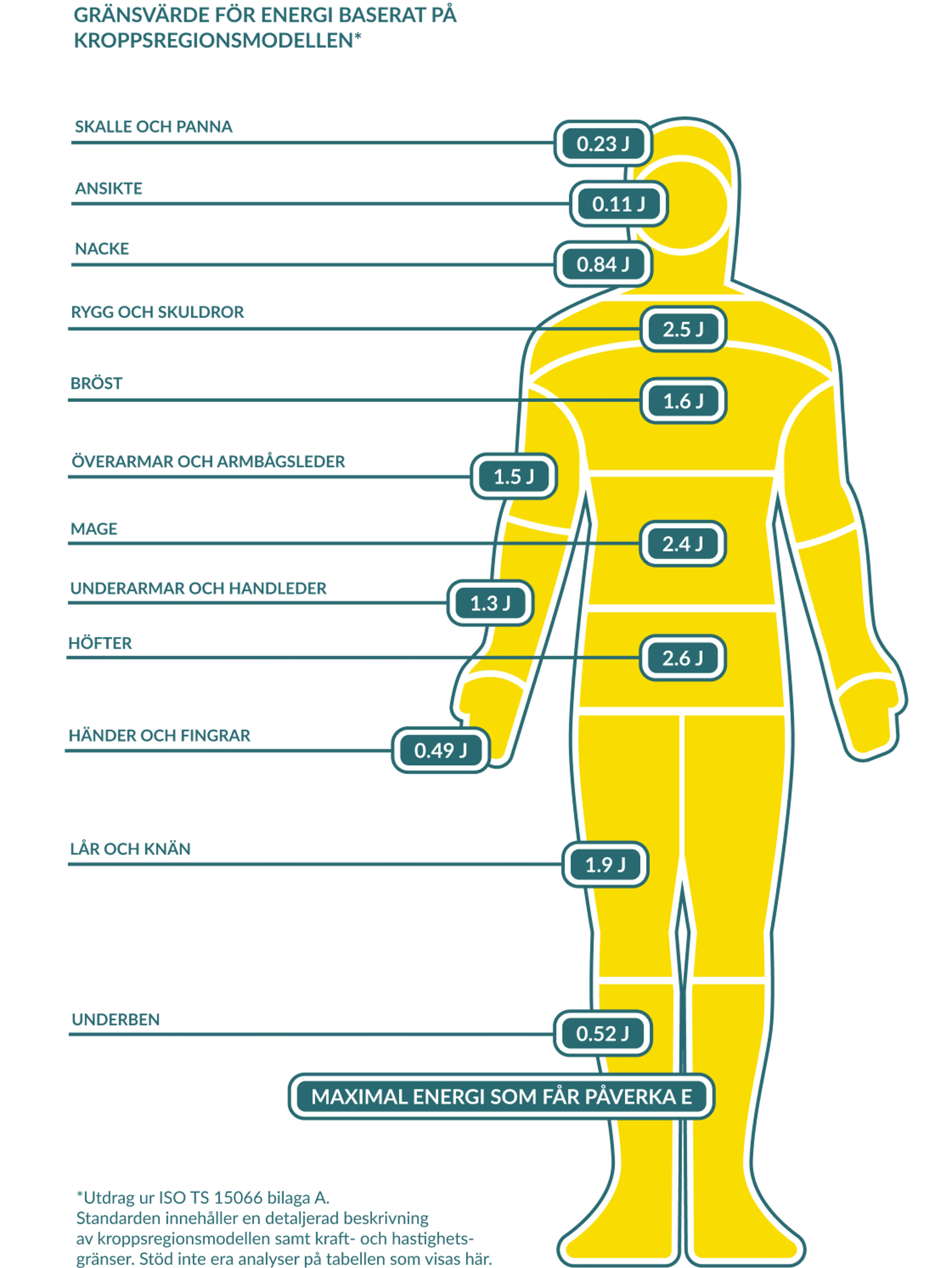
En samarbetsrobot arbetar med begränsad kraft och hastighet och säkerställer att människor som möter en rörlig samarbetsrobot inte kommer att skadas, även om de känner lite smärta. År med omfattande tester har resulterat i en lista över kraft-, hastighets- och energigränser som människor kan tåla när de utsätts för fysisk kontakt med maskinelement (se ISO TS 15066).
Samarbetsrobotar som rör sig inom dessa gränser kan anses vara säkra för interaktion mellan människor och robotar. Detta betyder dock inte att sådana applikationer automatiskt är säkra. Hela sammanhanget för roboten och verktyget som hanteras av roboten (sluteffekten) måste noggrant övervägas.
Exempel:
Föreställ dig att sitta bredvid en robot som hanterar en spruta med giftig vätska. Rörelsens hastighet och kraft blir plötsligt sekundära problem.
Säkerhet i samarbetsarbetsytor
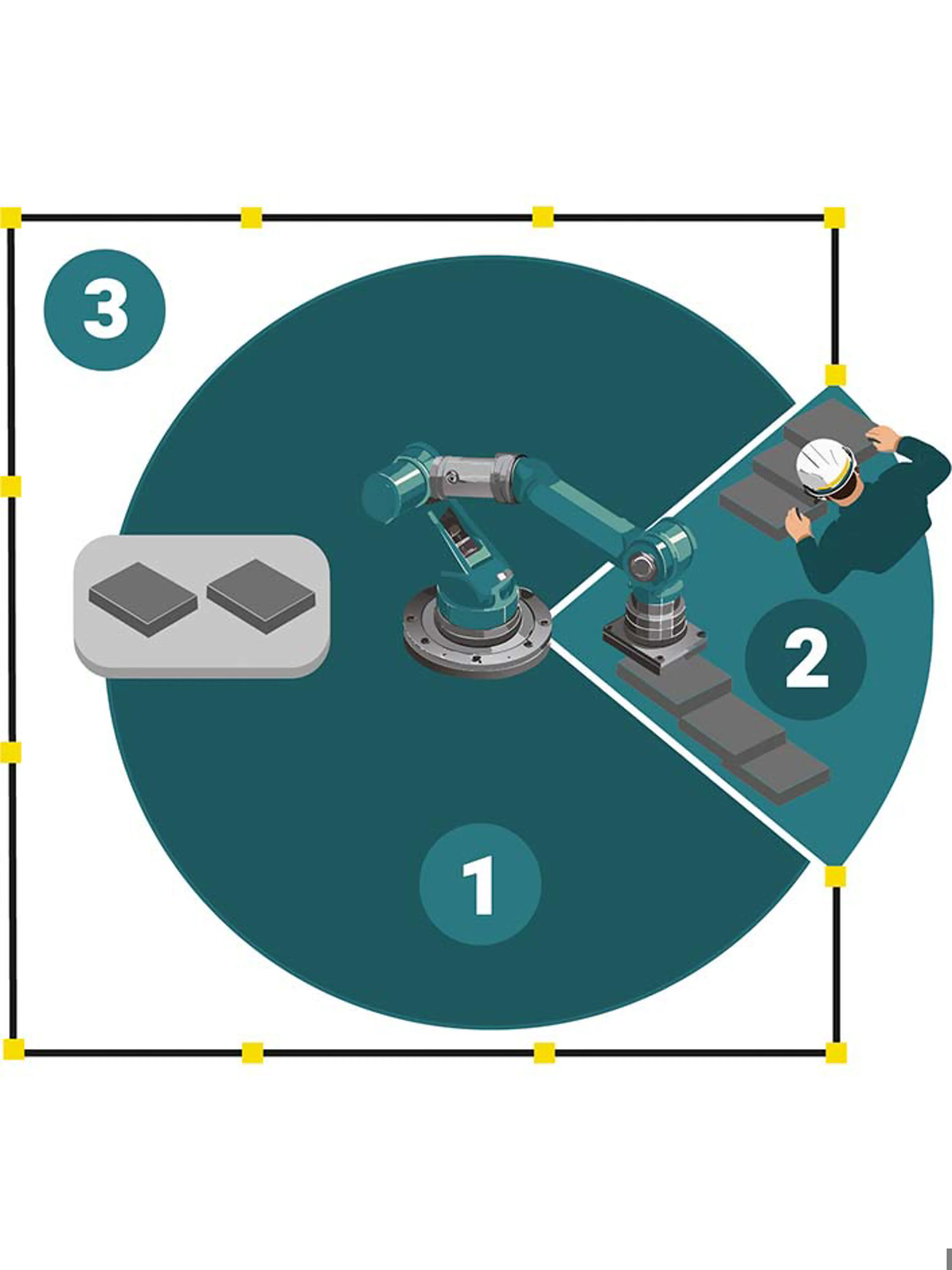
I grafiken delar en mänsklig operatör och en robot det samarbetsarbetsområdet.
Säkerhetsåtgärder:
- En farlig robot får inte röra sig i samarbetsområdet om en person är närvarande.
- Beroende på personens avstånd och rörelseshastighet kan roboten behöva sakta ner och stoppa när personen närmar sig.
Säkerhetsstängsel:
- Säkerhetsstängsel är fortfarande nödvändigt i vissa samarbetsapplikationer idag och kommer att fortsätta vara det i framtiden.
- Staket tar på sig nya roller, som att avgränsa ett samarbetsområde från vanliga arbetsytor och gångvägar.
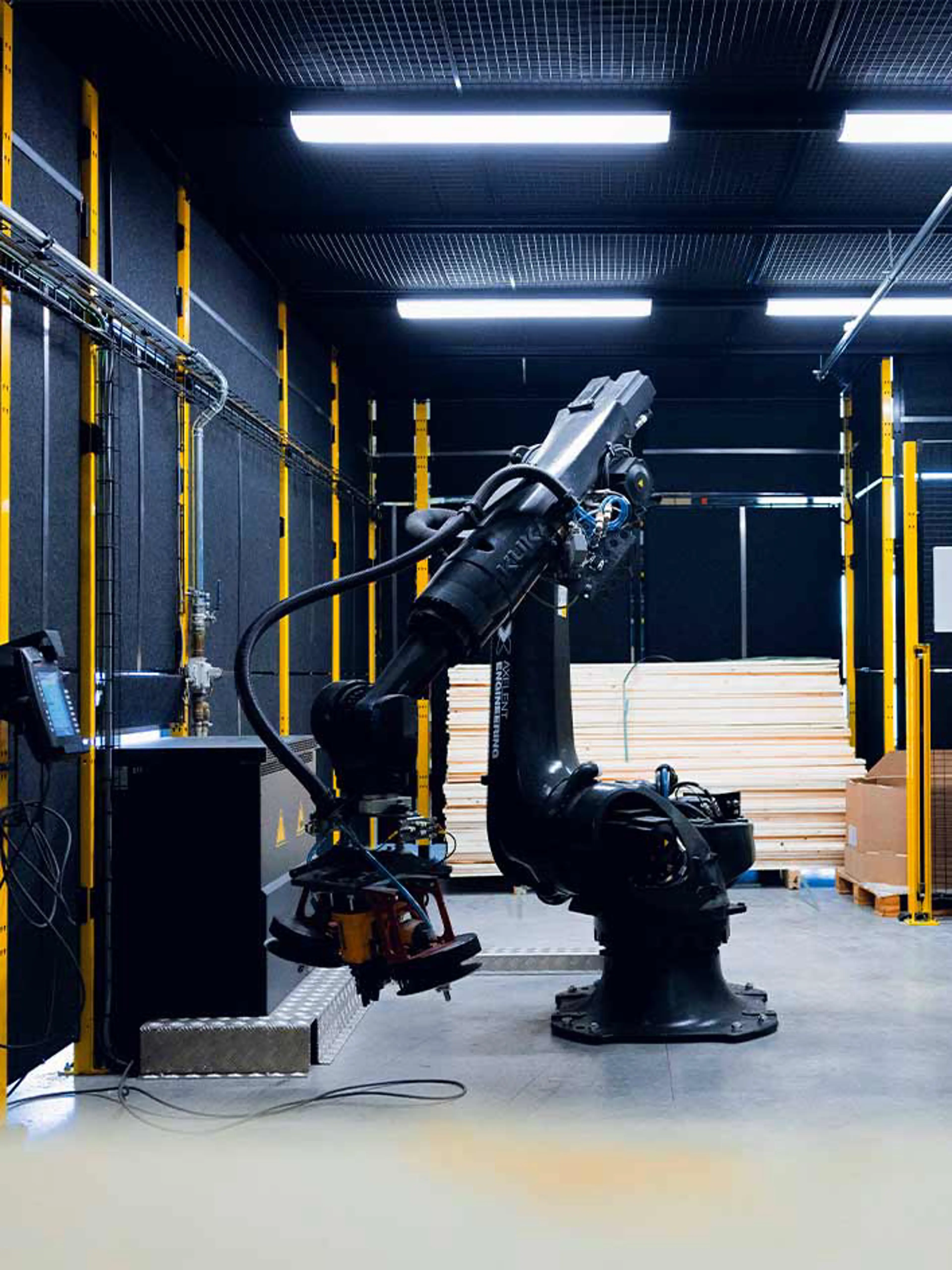
Industriell robotsäkerhet
Robotsäkerhet beror till stor del på stängda "celler" med stängsel och åtkomstdörrar. Men i många applikationer behövs dessutom övervakningssystem eller kan till och med ersätta robotens "bur".
Avancerade detekteringssystem:
- Den mest avancerade formen för detekteringssystem är en 3D-kamera. Det måste installeras i en tillräcklig höjd över arbetsytan för att säkerställa att “ser ” alla områden där personer kan flytta.
- I många robotceller används en kombination av säkerhetsstaket med dörrar, ljusbarriärer och räckvidd.
Se upp för personer som är kvar i farozonen bakom detekteringsanordningarna. Om det är möjligt kan ytterligare säkerhetsåtgärder behövas.
Säkra utrymmen för robotar
Stängsel kan användas för att skapa ett ”skyddat utrymme”, men det bör normalt inte användas för att definiera det ”begränsade utrymmet”.
Roboter som kolliderar med staket i hög hastighet eller med betydande kraft kan orsaka deformation, även i robust stängsel, vilket innebär potentiella säkerhetsrisker. Dessutom kan staket tillåta individer att sticka fingrarna genom öppningarna, vilket ökar risken för skador. För att mildra dessa problem måste ett minimumavstånd på 120 till 200 mm bibehållas mellan det begränsade utrymmet och ytterkanten på staketet. Läs mer om att beräkna och bestämma rätt höjd och avstånd för skyddsstängsel i kapitel 3.2 “Välja maskinskydd ” (länk till det specifika avsnittet med illustrationen).
Därför är det inte tillräckligt att förlita sig på så kallad “robotsäker ” stängsel. Istället implementera lämpliga begränsningsanordningar för att säkerställa säkerhet, till exempel:
- Säkerhetsklassad rörelsekontrollprogramvara (överensstämmer med minst PL = d enligt (EN) ISO 13849-1 eller SIL 2 enligt (EN) IEC 62061)
- Rymdbegränsande mekanismer eller fysiska hårda stopp (t.ex. stoppblock och stift)
- Yttre begränsande anordningar (t.ex. mekaniska stopp eller närhetsomkopplare)
Stängsel är tänkt att hålla människor ute, inte tvärtom.

“Robot-safe ” staket – koncept eller missuppfattning?
Många ber om “robotsäker ” stängsel eller pekar på testresultat från stakettillverkare som visar slagmotstånd på 2000 joule eller mer.
Frågan i sig avslöjar en missuppfattning om robotens säkerhet. Robotsäkerhetsstandarder kräver att robotrörelsen begränsas med andra medel än stängsel eller andra skyddsåtgärder.
En robots rörelsesområde beror på dess storlek. Ofta är detta “maximala utrymme ” mycket större än nödvändigt för den aktuella operationen. Eftersom systemdesigners vill använda så lite golvyta som möjligt, är roboten programmerad för att hålla sig till ett mycket mindre “begränsat utrymme ”. Sedan används staket, ljusgardiner och räckviddskannrar för att definiera ett “skyddat utrymme ” runt det begränsade utrymmet som personer inte får komma in i.
Men ett säkerhetsavstånd behövs praktiskt taget alltid mellan det begränsade utrymmet och det skyddade utrymmet. Varför? Eftersom roboten behöver tid för att sakta ner och stanna när en person som kommer in i det skyddade utrymmet upptäcks (av en ljusbarriär, skanner, kamera eller dörrbrytare).

Denna infographic illustrerar hur man tänker kritiskt på säkerhetsavstånd för industrirobotar. Lär dig varför skyddsstängsel är viktigt, hur olyckor inträffar och när staket kanske inte är den enda lösningen. Upptäck de viktigaste övervägandena för att hålla människor säkra runt robotar.